Целевая функция. Оптимальное значение целевой функции называется
Целевая функция. Если доход от реализации одного стола равен С 1 рублей, то от реализации столов в объеме х 1 штук месячный доход
составит С
1 х
1 рублей. Аналогично месячный доход от реализации шкафов составит С
2 х
2 рублей. Обозначив общий доход (в руб.) через Z
, можно дать следующую математическую формулировку целевой функции: определить (допустимые) значения х
1 , и х
2 , максимизирующие величину общего дохода Z
= С
1 х
1 + С
2 х
2 =
| 2 |
| ∑ |
| j=1 |
C j x j .
Ограничения. При решении рассматриваемой задачи должны быть учтены ограничения на расход ресурсов. Пиломатериал идет на изготовление и столов и шкафов. На один стол идет а 11 (м 3) пиломатериала, тогда на столы в количестве x 1 штук потребуется а 11 x 1 (м 3) пиломатериала. На изготовление шкафов в количестве х 2 штук потребуется а 12 х 2 (м 3) пиломатериала. Всего пиломатериала потребуется а 11 х 1 + а 12 x 2 (м 3). Расход его не должен превышать величины b 1 (м 3). Тогда ограничение на пиломатериал запишем в виде неравенства
На переменные задачи х 1 и х 2 должны быть наложены условия неотрицательности и неделимости, т.е. введем ограничения
х 1 ≥ 0, х 2 ≥ 0,
где х 1 , х 2 - целые числа.
Итак, математическую модель задачи можно записать следующим образом: определить месячные объемы производства столов х 1 и шкафов х 2 , при которых достигается

Следует отметить, что с формальных позиций данная модель является линейной, потому что все входящие в нее функции (ограничения и целевая функция) линейны. Но линейный характер построенной модели должен предполагать наличие двух свойств - пропорциональности и аддитивности. Пропорциональность предполагает прямо пропорциональную зависимость между переменной и целевой функцией и объемом потребления ограниченных ресурсов. Например, прямая пропорциональность не будет иметь места, если ввести зависимость доходов фабрики от размера партии продаваемых продуктов. Аддитивность наблюдается в том, что составляющие дохода в целевой функции независимы, общий доход равен сумме доходов. Если фабрика производит два конкретных вида продукции, увеличение сбыта одного из которых отрицательно сказывается на объеме реализации другого, то такая модель не обладает свойством аддитивности.
Для определения переменных рассмотренной модели могут использоваться методы линейного программирования. Базовым методом ЛП является симплекс-метод, разработанный Г. Данцигом . Задачу ЛП можно решить и графически. Графическое представление решения задачи поможет понять и идею симплекс-метода. Конкретизируем задачу, представив исходные данные в табл. 3.1 (данные приводятся условные).
Таблица 3.1
| Ресурсы | Расход ресурсов на единицу продукции | Запас ресурсов |
|
| Стол | Шкаф |
||
| Пиломатериалы (м 3) | 0,06 | 0,07 | 42 |
| Шурупы (кг) | 0,04 | 0,085 | 34 |
| Краска (кг) | 0,035 | 0,12 | 42 |
| Цена единицы продукции (руб.) | 500 | 750 | - |
Запишем модель задачи с приведенными данными:

В дальнейшем ограничение (3.5) учитывать не будем, а решение задачи получим округлением найденных переменных задачи (3.0-3.4).
44 :: 45 :: 46 :: 47 :: Содержание
47 :: 48 :: 49 :: 50 :: 51 :: Содержание
3.2.2. Графический способ решения ЗЛП
Для определения решения ЗЛП с двумя переменными выполним следующие действия.
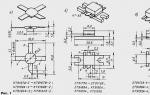
1. Построим множество допустимых решений Ω задачи. Данное множество Ω образуется в результате пересечения полуплоскостей (ограничений) (3.1-3.4). На рис. 3.2 множество допустимых решений показано в виде пятиугольника. Области, в которых выполняются соответствующие ограничения в виде неравенств, указываются стрелками, направленными в сторону допустимых значений переменных. Полученный многогранник Ω называют симплексом. Отсюда и название метода поиска оптимального решения.
2. Построим вектор-градиент С, составленный из производных целевой функции по переменным задачи, который указывает направление возрастания целевой функции по этим переменным. С = (С 1 , С 2) = (500,750). Начало этого вектора лежит в точке с координатами (0, 0), а конец - в точке (500, 750). Ряд параллельных штриховых линий, перпендикулярных вектору-градиенту, образует множество целевых
Функций при произвольно выбранных значениях Z . При Z = 0 прямая (целевая функция) проходит через точку (0, 0), а целевая функция Z принимает минимальное значение.
![]()
Рис. 3 2 Геометрическая интерпретация ЗЛП
3. Переместим прямую, характеризующую доход Z , в направлении вектор-градиента (для задачи max Z ) до тех пор, пока она не сместится в область недопустимых решений. На рис. 3.2 видно, что оптимальному решению соответствует точка X* = (х 1 *, х 2 *). Так как точка X* является точкой пересечения прямых (3.1) и (3.2), значения х 1 * и х 2 * определяются решением системы двух уравнений:
Решение указанной системы уравнений дает результат х 1 * = 517,4 и х 2 * =156,5. Полученное решение означает, что месячный объем производства столов должен составить 517 шт., а шкафов - 156 шт. Доход, полученный в этом случае, составит:
Z = 517 · 500 + 156 · 750 = 375500 рублей
ЗЛП со многими переменными можно решить графически, если в ее канонической записи число неизвестных n и число линейно независимых уравнений m связано соотношением n-m ≤ 2. Запишем каноническую форму ЗЛП, рассмотренную выше. Для этого введем новые переменные x 3 , x 4 и x 5 .
Для данной ЗЛП число переменных n = 5, а число линейно-независимых уравнений m = 3. Эта и другие ЗЛП в канонической форме могут быть решены графически, если n-m ≤ 2.
Выберем любые m неизвестные и выразим каждую из них через оставшиеся (n-m ) переменные. В нашем случае удобно взять переменные x 3 , x 4 и x 5 и выразить их через x 1 и x 2 .
Учитывая неотрицательность всех переменных, в том числе х 3 ≥ 0, х 4 ≥ 0 и х 5 ≥ 0, а также зависимость последних от двух переменных x 1 и х 2 , можно графически показать решение расширенной задачи с проекцией на переменные x 1 и х 2 . Полуплоскость х 3 ≥ 0 (см. рис. 3.2) совпадает с ограничением (3.1), полуплоскость х 4 ≥ 0 - с ограничением (3.2), а полуплоскость х 5 ≥ 0 - с ограничением (3.3). Точка оптимума в координатах x 1 и х 2 образуется в результате пересечения полуплоскостей х 3 и х 4: x 1 * = 517,4; х 2 = 156,5. Соответственно значения переменных х 3 Ä х 4 будут нулевыми: x 3 * =0; х 4 * = 0. Тогда из (3.9) следует, что x 5 * = 42 - 0,035·517,4 - 0,12·156,5 = 5,1. Решением ЗЛП (3.6-3.10) будет вектор X* = (517,4; 156,5; 0; 0; 5,1).
Геометрическое представление ЗЛП отражает следующее:
1) множество допустимых решений Ω выпуклое;
2) оптимальное решение не существует, если множество Ω пустое или неограниченное в направлении перемещения семейства гиперплоскостей уровня цели поиска экстремума;
3) решение находится в одной из угловых точек (вершин) множества допустимых решений Ω, получивших название базисных;
4) для канонической ЗЛП базисные решения характеризуются вектором X - (x 1 , x 2 ,..., х n), в котором значения m переменных отличны от нуля, где m - число линейно независимых уравнений задачи (число базисных переменных угловой точки множества Ω).
Для оптимального решения X* рассмотренного примера базисными переменными стали переменные x 1 , х 2 и х 5 . Оставшиеся переменные (n - m ) называют небазисными или свободными. Их значения в угловой точке равны нулю.
Обратите внимание на то, что любая базисная переменная может быть выражена через небазисные, и базисная переменная в модели (3.6)-(3.10) записывается один раз с коэффициентом единица.
Приведенная задача использования ресурсов имеет весьма простую постановку и структуру. В ней могут появиться требования учета выпуска продуктов в определенном соотношении, учета их возможного выпуска по различным технологиям, учета загрузки оборудования и другие. Все эти ситуации достаточно хорошо описываются моделями линейного программирования.
47 :: 48 :: 49 :: 50 :: 51 :: Содержание
50 :: 51 :: 52 :: 53 :: 54 :: 55 :: 56 :: 57 :: 58 :: 59 :: 60 :: 61 :: Содержание
3.2.3. Алгебраический (симплексный) метод решения ЗЛП
Рассмотренный выше графический способ решения задачи ЛП позволяет понять идею методов оптимизации, в том числе и методов линейного программирования. Сущность всех методов математического программирования заключается в том, чтобы вместо "слепого" перебора вариантов плана вести перебор выборочный, организованный, направленный на скорейшее, а в некоторых случаях и последовательное, улучшение решения.
Экстремальное решение достигается не внутри области допустимых решений Ω, а на границе ее (см. рис. 3.2); если быть еще точнее, то в одной из вершин угловых точек многоугольника, образованного в результате пересечения прямых, связанных с определенными ограничениями, либо на отрезке между двумя соседними угловыми точками. Так как экстремум обязательно достигается в одной или двух угловых точках допустимых планов, то нужно просто вычислить значения целевых функций во всех угловых точках (в нашем примере их пять) и
выбрать ту из них, которой соответствует экстремальное значение. При большом числе переменных и при большом числе ограничений число угловых точек многогранника становится столь велико, что вычислить в каждой из них значение целевой функции, запомнить эти значения и сравнить между собой весьма проблематично даже для мощных ЭВМ. Поэтому нужно искать какой-то другой путь решения.
К точке оптимума можно подобраться последовательно, переходя от одной угловой точки к соседней, например, каждый раз от исходной (опорной) точки X 0 (х 1 = 0, х 2 = 0) последовательно к той соседней, которая ближе и быстрее приближает к X*. Перебор точек решения по такой схеме позволяет предложенный Р. Данцигом симплекс-метод . Для нашего примера на первом шаге (итерации) от опорной точки X 0 мы перейдем по схеме симплекс-метода к точке X 1 с координатами (700, 0) и на втором шаге перейдем к точке X*. По другому же пути к точке X* можно добраться лишь за три шага. С вычислительной точки зрения симплекс-метод реализуется через так называемые симплекс-таблицы, которые рассчитываются для каждой угловой точки, начиная с опорной. Симплекс-таблицы позволяют определить оптимальность принимаемого решения, значения переменных, оценить ресурсные параметры (ограничения) на предмет их дефицитности, и в случае неоптимального решения, указывают, как перейти к соседней точке (следующей таблице). В силу различных особенностей и постановок задач ЛП симплекс-метод имеет различные модификации: прямой, двойственный, двухэтапный .
Для реализации любого из симплекс-методов необходимо построение начального опорного плана .
Пусть система ограничений такова:
![]()
Добавив к левым частям неравенства дополнительные переменные x n+i ≥ 0, i = 1, m , получим каноническую (расширенную) задачу, стратегически эквивалентную исходной, с системой ограничений:
![]()
Тогда начальным опорным планом будет вектор

Который удовлетворяет допустимости решения (он является базисным, т.к. число ненулевых элементов равно m , и опорным, т.к. все x j ≥ 0). Пусть система ограничений такова:
![]()
Вычтя из левых частей неравенства дополнительные переменные x n+i ≥ 0, i = 1, m , получим расширенную задачу, стратегически эквивалентную исходной, с системой ограничений:
![]()
Однако теперь дополнительные переменные входят в левую часть ограничений с коэффициентами, равными минус единице. Поэтому план
не удовлетворяет условиям допустимости решения (он базисный, но не опорный).
Как в первом, так и во втором случае при добавлении дополнительных переменных (они же становятся базисными переменными) в систему ограничений эти же переменные вводятся в целевую функцию с коэффициентами, равными нулю: C n+i ≥ 0, i = 1, m , т.е. в целевой функции при базисных переменных стоят нулевые коэффициенты, а при небазисных - коэффициенты С j , j = 1, n . Пусть целевая функция стремится к минимуму. Тогда значение целевой функции может быть уменьшено, если в базис вводить ту переменную x j , при которой коэффициент С j целевой функции имеет знак минус. И если все коэффициенты в целевой функции имеют знак плюс, то уменьшить ее значение не представляется возможным. Поэтому признаком оптимальности решения ЗЛП служат коэффициенты (оценки) в целевой функции при небазисных переменных.
В зависимости от выполнения условий оптимальности и допустимости применяют ту или иную схему решения ЗЛП .
Методы решения ЗЛП разбиваются на две группы:
1) методы последовательного улучшения решения. В основу их заложено движение от первоначальной точки (любое допустимое, но неоптимальное решение задачи в канонической форме) к оптимальной
Точке за конечное число шагов (итераций). К этой группе относятся прямой симплекс-метод, метод потенциалов и другие;
2) методы последовательного сокращения невязок. В основу их заложено движение от исходной условно-оптимальной точки, лежащей вне области допустимых решений, но удовлетворяющей признаку оптимальности решения, к оптимальной и допустимой точке. К этой группе относятся двойственный симплекс-метод, венгерский метод и другие. Все алгоритмы решения ЗЛП опираются на каноническую форму задачи. Поэтому число искомых переменных канонической задачи будет больше, чем в исходной.
При выборе алгоритма решения задачи ЛП исходят из следующих данных. Пусть ЗЛП приведена к каноническому виду, решается на минимум и свободные коэффициенты b i ≥ 0, i = 1, m . Тогда, если в целевой функции задачи имеются отрицательные коэффициенты (условие оптимальности решения задачи не выполняется), а начальный план задачи не имеет отрицательных значений переменных (условие допустимости решения задачи выполняется), то для решения предлагаемой задачи следует воспользоваться алгоритмом прямого симплекс-метода (табл. 3.2). Двойственный симплекс-метод применяется, если условие оптимальности решения задачи выполняется, а допустимости - нет. Двухэтапный симплекс-метод применяется, если условия и оптимальности и допустимости решения задачи не выполняются.
Таблица 3.2

Рассмотрим прямой симплекс-метод решения задач ЛП на следующем примере.
Пример 3.1
Минимизировать функцию Z = -x 1 - х 2 при ограничениях: 0,5х 1 + х 2 ≤ 1;
2х 1 + х 2 ≤ 2;
х 1 , х 2 ≥ 0.

Графическое представление задачи (3.11-3.14) показано на рис. 3.3.

Рис. 3.3. Графическое представление задачи (3.11) - (3.14)
Начальной базисной опорной точкой задачи будет вектор Х 0 = (0; 0; 1; 2). Значение целевой функции в этой точке Z (X 0) = 0.
Перенесем в целевой функции (3.11) переменную Z за знак равенства и данную задачу запишем в виде табл. 3.3, называемой симплекс-таблицей (нулевая итерация).
Таблица 3.3

В литературе описаны и другие формы записи симплекс-таблицы . По симплекс-таблице всегда можно сказать, является ли найденное решение оптимальным. В данном случае решение х 1 = 0; х 2 = 0; х 3 = 1; х 4 = 2 не является наилучшим, так как можно ввести в базис одну из переменных х 1 или х 2 (при этих переменных стоят коэффициенты со знаком минус с 1 = -1 и с 2 = - 1), уменьшив значение целевой функции. Тогда вводя в базис одну из небазисных переменных х 1 или х 2 (увеличив ее значение), следует вывести из базиса переменную х 3 или х 4 (доведя ее значение до нуля). В прямом симплекс-методе рассматриваются последовательно вопросы:
переход к новой канонической форме ЗЛП (к следующей итерации симплекс-таблицы).
. Если в базис включаем переменную x 1 , то это значит, что увеличиваем ее значение с нуля до каких-то определенных пределов. До каких? Обратимся к рис. 3.3. Крайним значением для переменной х 1 будет единица, при этом переменная (прямая) х 4 в ограничении (3.13) примет значение, равное нулю, то есть из базиса выйдет х 4 , а ее место займет переменная x 1 . Из уравнения (3.12) определим значение х 3 = 1 - 0,5 · 1 = 0,5. Таким образом, на следующей итерации (шаге) допустимым решением будет вектор X 1 = (1; 0; 0,5; 0). Значение целевой функции в этой точке Z (1) = -1.
Не прибегая к графическому представлению задачи, определение предельного значения x l и определение переменной х 4 , которую следует вывести из базиса, можно провести на следующем распределении. Если вывести из базиса переменную х 3 , т.е. должно быть х 3 = 0, то из (3.12) следует x l = b 1 /а 1 s = 1/0,5 = 2. Если вывести из базиса переменную х 4 , т.е. сделать х 4 = 0, то из (3.13) x l = b 2 /а 2 s = 1/1 = 1. Получается, что значение x l = 1 или x l = 2. Но при x l = 2 в уравнении (3.13) переменная х 4 = 1 - 2 - 0,5 · 0 = -1, что противоречит условию допустимости решения (3.14). Поэтому включаем в базис x l с наименьшим значением, которое определено из второго ограничения. В этом ограничении находится исключаемая переменная из базиса х 4 . В общем случае переменная x s , включаемая в базис, может увеличиваться до значения
Пусть максимум достигается в строке r , т.е. x s = b r /a rs , тогда в этой строке базисная переменная обращается в нуль, т.е. выводится из базиса. Строку r называют ведущей строкой , а элемент а rs - ведущим элементом . Если в ведущем столбце не найдутся положительные a is , то это означает, что ЗЛП не имеет области допустимых решений.
Переход к новой канонической форме ЗЛП . В табл. 3.4 показаны переходы от нулевой итерации к последующим методам последовательного исключения вновь вводимой базисной переменной из неведущих строк. Новая строка на последующей итерации с вновь введенной базисной переменной получается путем деления элементов ведущей строки на ведущий элемент, относительно полученной строки далее производится исключение новой базисной переменной из других строк. В табл. 3.4 на итерации 1’ указаны коэффициенты при базисных переменных, под которые осуществляется соответствующий переход. Ведущие элементы в таблице помечены звездочкой.
Расчет коэффициентов на очередной итерации можно производить по правилу четырехугольника .
Эта таблица на итерации 2 соответствует оптимальному решению X* = X 2 = (2/3; 2/3; 0; 0).
Значение целевой функции Z (X*) = -4/3.
Таблица 3.4

Рассмотрим двойственный симплекс-метод решения задачи ЛП на следующем примере.
Пример 3.2
Максимизировать функцию Z = -х 1 - х 2 при ограничениях:
0,5х 1 + х 2 ≤ 1;
2х 1 + х 2 ≥ 2;
х 1 , х 2 ≥ 0.
В канонической форме ЗЛП примет вид

Графическое представление задачи показано на рис. 3.4.

Рис. 3.4. Графическое представление задачи (3.15) - (3.18)
Составим симплекс-таблицу 3.5.
Таблица 3.5

Нулевая строка в табл. 3.5 указывает на то, что признак оптимальности решения задачи выполнен (нет отрицательных коэффициентов).
Однако начальное решение Х 0 = (0; 0; 1; -2) является отрицательным.
Попытаемся решить задачу (в противоположность прямому симплекс-методу) последовательным движением от исходной недопустимой точки Х 0 к X*, рассматривая вопросы:
поиск переменной для исключения из базиса;
поиск переменной для включения в базис;
переход к новой форме ЗЛП (последующей итерации решения).
Будет и оптимальным и допустимым. В нашем примере исключаем переменную х 4 = -2.
Поиск переменной для включения в базис . Какую небазисную переменную включить в базис х 1 или х 2 ? В принципе любую можно включить в базис с целью движения в область допустимых решений. Из графического представления задачи (см. рис. 3.4) видно, что при включении в базис переменной х 2 мы попадаем сразу в допустимую и оптимальную точку X*. В литературе показано, что к оптимальному решению можно добраться быстрее, если выбирать для включения в базис переменную x s такую, что для нее отношение C s /|a rs | для всех элементов a rs ведущей строки будет минимальным:
Если все элементы a rj · ≥ 0, то это будет означать, что задача не имеет допустимых решений. В нашем примере минимальное отношение (3.19) достигается для переменной х 1 и равно 1/2. Решим задачу табличным способом (табл. 3.6).
Таблица 3.6

Оптимальное решение: X* = (1; 0; 1/2; 0;); Z (X* ) = -z" = -1.
Предположим, что при решении предыдущего примера (см. табл. 3.6) в базис включили бы не х 1 , а переменную х 2 , то получили бы на итерации 1 следующую табл. 3.7.
Таблица 3.7

Нулевая строка в табл. 3.7 указывает на то, что признак оптимальности решения задачи не выполнен, и промежуточное решение X 1 = (0; 2; -1; 0) является недопустимым. Далее задачу можно решать двухэтапным симплекс-методом, методом больших штрафов и другими . Рассмотрим двухэтапный симплекс-метод .
1. Вводим дополнительно по одной переменной, делая их базисными, в те уравнения, в которых не выполнялись условия допустимости. В нашем случае вводим переменную х 5 в строку (1), прежде изменив знаки на противоположные (табл. 3.8), и столбец под х 5:
3/2 х 1 - х 3 - х 4 + х 5 = 1.
2. Вводим новую (фиктивную) целевую функцию W как сумму вновь вводимых дополнительных переменных, выраженную через небазисные переменные. В нашем случае W = х 5 = 1 - 3/2 x 1 + х 3 + х 4 . Вносим дополнительно строку (3) в табл. 3.8 с фиктивной целевой функцией -W - 3/2 х 1 + х 3 + х 4 = -1.
3. Применяем прямой симплекс-метод для минимизации фиктивной целевой W с пересчетом всех коэффициентов. Первый этап заканчивается, если фиктивная целевая функция W обратится в нуль W = 0, а следовательно, и дополнительные переменные тоже будут с нулевыми значениями. Далее строка с фиктивной целевой функцией и столбцы с дополнительными переменными не рассматриваются. Если в результате минимизации целевой W получим оптимальное значение W , отличное от нуля W ≠ 0, то это будет означать, что исходная ЗЛП не имеет допустимых решений.
Применяем прямой симплекс-метод для оптимизации основной
целевой функции Z . Включаем в базис переменную х 3 вместо переменной х 2 . Делаем пересчет коэффициентов на итерации 3 и получаем оптимальное решение: X* = (1; 0; 1/2; 0;); Z (X*) = -z" = -1.
Таблица 3.8
50 :: 51 :: 52 :: 53 :: 54 :: 55 :: 56 :: 57 :: 58 :: 59 :: 60 :: 61 :: Содержание
61 :: 62 :: 63 :: 64 :: 65 :: 66 :: 67 :: 68 :: 69 :: 70 :: Содержание
3.2.4. Анализ модели задачи линейного программирования
Данные в оптимальной симплекс-таблице позволяют делать всесторонний анализ линейной модели, в частности анализ чувствительности оптимального решения к изменению запасов ресурсов и вариациям коэффициентов целевой функции. Дадим вначале понятие двойственности задач линейного программирования.
Рассмотрим задачу линейного программирования (3.20)-(3.22) на примере задачи использования ресурсов. Если для этой исходной ЗЛП (назовем ее прямой) ввести переменные y i для оценки ресурсных ограничений (3.21) и сделать переход к математической постановке другой задачи (двойственной или обратной) вида (3.23)-(3.25), то решения прямой и двойственной задач будут находиться во взаимной зависимости, выраженной через соответствующие теоремы двойственности .

Очевидно, задача, двойственная двойственной, совпадает с исходной. Поэтому нет разницы, какую принять в качестве прямой, а какую - двойственной. Говорят о паре взаимно двойственных задач.
27 августа 2017 в 14:20Решение прямой и двойственной задачи линейного программирования средствами Python
Введение
Следует отметить, что методы решения задач линейного программирования относятся не к экономике, а к математике и вычислительной технике. При этом экономисту нужно обеспечить максимально комфортные условия диалога с соответствующим программным обеспечением. В свою очередь такие условия могут обеспечивать только динамично развивающиеся и интерактивные среды разработки, имеющие в своём арсенале набор необходимых для решения таких задач библиотек. Одной из каких сред разработки программного обеспечения безусловно является Python.Постановка задачи
В публикациях рассматривались решения прямых задач оптимизации методом линейного программирования и был предложен обоснованный выбор решателя scipy. optimize.Однако известно , что каждой задаче линейного программирования соответствует так называемая выделенная(двойственная)задача. В ней по сравнению с прямой задачей строки переходят в столбцы, неравенства меняют знак, вместо максимума ищется минимум (или наоборот, вместо минимума - максимум). Задача, двойственная к двойственной - эта сама исходная задача.
Решение двойственной задачи очень важно для анализа использования ресурсов. В данной публикации будет доказано, что оптимальные значения целевых функций в исходной и двойственной задачах совпадают (т.е. максимум в исходной задаче совпадает с минимумом в двойственной).
Оптимальные значения стоимости материала и труда будут оцениваться по их вкладу в целевую функцию. В результате будут получены «объективно обусловленные оценки» сырья и рабочей силы, которые не совпадают с рыночными ценами.
Решение прямой задачи о оптимальной производственной программе
Учитывая высокий уровень математической подготовки подавляющего большинства пользователей данного ресурса не стану приводить балансовые уравнения с верхними и нижними ограничениями и введением для перехода к равенствам дополнительных переменных. Поэтому сразу приведу обозначения используемых в решении переменных:N – количество видов производимых изделий;
m– количество видов используемого сырья;
b_ub - вектор имеющихся ресурсов размерности m;
A_ub – матрица размерности m×N, каждый элемент которой является расходом ресурса вида i на производство единицы изделия вида j;
с - вектор прибыли от производства единицы изделия каждого вида;
x – искомые объёмы производимых изделий каждого вида (оптимальный план производства) обеспечивающие максимальную прибыль.
Функция цели
maxF(x)=c×x
Ограничения
A×x≤b
Численные значения переменных:
N=5; m=4; b_ub = ; A_ub = [, , ,]; c = .
Задачи
1.Найти x для обеспечения максимальной прибыли
2. Найти использованные ресурсы при выполнении п.1
3. Найти остатки ресурсов (если они есть) при выполнении п.1
Для определения максимума (по умолчанию определяется минимум коэффициенты целевой функции нужно записать с отрицательным знаком c = [-25, -35,-25,-40,-30] и проигнорировать знак минус перед прибылью.
Используемые при выводе результатов обозначения:
x
– массив значений переменных, доставляющих минимум (максимум) целевой функции;
slack
– значения дополнительных переменных. Каждая переменная соответствует ограничению-неравенству. Нулевое значение переменной означает, что соответствующее ограничение активно;
success
– True, если функции удалось найти оптимальное решение;
status
– статус решения:
0 – поиск оптимального решения завершился успешно;
1 – достигнут лимит на число итераций;
2 – задача не имеет решений;
3 – целевая функция не ограничена.
nit
– количество произведенных итераций.
Листинг решения прямой задачи оптимизации
#!/usr/bin/python # -*- coding: utf-8 -*- import scipy from scipy.optimize import linprog # загрузка библиотеки ЛП c = [-25, -35,-25,-40,-30] # список коэффициентов функции цели b_ub = # список объёмов ресурсов A_ub = [, # матрица удельных значений ресурсов , , ] d=linprog(c, A_ub, b_ub) # поиск решения for key,val in d.items(): print(key,val) # вывод решения if key=="x": q=#использованные ресурсы print("A_ub*x",q) q1= scipy.array(b_ub)-scipy.array(q) #остатки ресурсов print("b_ub-A_ub*x", q1)
Результаты решения задачи
nit 3
status 0
success True
x [ 0. 0. 18.18181818 22.72727273 150. ]
A_ub*x
b_ub-A_ub*x [ 0. 0. 0. 90.90909091]
fun -5863.63636364
slack [ 0. 0. 0. 90.90909091]
Выводы
- Найден оптимальный план по видам продукции
- Найдено фактическое использование ресурсов
- Найден остаток не использованного четвёртого вида ресурса [ 0. 0 0.0 0.0 90.909]
- Нет необходимости в вычислениях по п.3, так как тот же результат выводить в переменной slack
Решение двойственной задачи о оптимальной производственной программе
Четвёртый вид ресурса в прямой задаче использована не полностью. Тогда ценность этого ресурса для предприятия оказывается более низкой по сравнению с ресурсами, ограничивающими выпуск продукции, и предприятие готово заплатить более высокую цену за приобретение ресурсов, позволяющих увеличить прибыль.Введём новое назначение искомой переменной x как некоторой «теневой» цены, определяющей ценность данного ресурса в отношении прибыли от реализации выпускаемой продукции.
C – вектор имеющихся ресурсов;
b_ub – вектор прибыли от производства единицы изделия каждого вида;
A_ub_T– транспонированная матрица A_ub.
Функция цели
minF(x)=c×x
Ограничения
A_ub_T ×x≥ b_ub
Численные значения и соотношения для переменных:
с = ; A_ub_T transpose(A_ub); b_ub = .
Задача:
Найти x показывающий ценность для производителя каждого вида ресурсов.
Особенности решения с библиотекой scipy. optimize
Для замены ограничений сверху на ограничения с низу необходимо умножить на минус единицу обе части ограничения – A_ub_T ×x≥ b_ub… Для этого исходные данные записать в виде: b_ub = [-25, -35,-25,-40,-30]; A_ub_T =- scipy.transpose(A_ub).
Листинг решения двойственной задачи оптимизации
#!/usr/bin/python # -*- coding: utf-8 -*- import scipy from scipy.optimize import linprog A_ub = [, , , ] c= b_ub = [-25, -35,-25,-40,-30] A_ub_T =-scipy.transpose(A_ub) d=linprog(c, A_ub_T, b_ub) for key,val in d.items(): print(key,val)
Результаты решения задачи
nit 7
message Optimization terminated successfully.
fun 5863.63636364
x [ 2.27272727 1.81818182 6.36363636 0. ]
slack [ 5.45454545 2.27272727 0. 0. 0. ]
status 0
success True
Выводы
Третий вид ресурсов имеет наибольшую ценность для производителя поэтому данный вид ресурсов должен быть закуплен в первую очередь, затем первый и второй вид. Четвёртый вид ресурса имеет для производителя нулевую ценность и закупается последним.Результаты сравнения прямой и двойственной задачи
- Двойственная задача расширяет возможности планирования выпуска продукции, но средствами scipy. optimize решается за вдвое большее чем прямая количество итераций.
- Переменная slack выводит информацию об активности ограничений в виде неравенств, что может быть использовано, например, для анализа остатков сырья.
- Прямая задача является задачей максимизации, а двойственная - задачей минимизации, и наоборот.
- Коэффициенты функции цели в прямой задаче являются ограничениями в двойственной задаче.
- Ограничения в прямой задаче становятся коэффициентами функции цели в двойственной.
- Знаки неравенств в ограничениях меняются на противоположные.
- Матрица системы равенств транспонируется.
Cтраница 2
Из таблицы видно, что для сравнительно близких оптимальных значений целевой функции (f (z) (при отклонениях порядка 1 %) количество изделий, подлежащих выпуску по этим оптимальным планам, по отдельным наименованиям колеблется в пределах нескольких сотен. Таким образом, эта задача является неустойчивой.
В результате решения задачи линейного программирования находят оптимальное значение целевой функции (желательное сочетание изделий - максимальный доход), а также соответствующие этому оптимальному решению значения переменных: основных х - типы изделий; дополнительных zt - резервы по ограниченным ресурсам; двойственных Уг - мера дефицитности ресурсов; дополнительных двойственных У - - какую продукцию целесообразно включить в оптимальный план.
Если множество решений является непустым, то оптимальное значение целевой функции может быть либо конечным, либо неограниченно большим. В случае когда оптимальное значение целевой функции конечно, оно соответствует экстремальной точке.
Поскольку пространство решений может быть неограниченным, оптимальное значение целевой функции может также оказаться бесконечно большим.
Все ограничения удовлетворяются, если и только если оптимальное значение целевой функции выпуклой задачи равно нулю. В противном случае минимальное значение явля-ется неограниченным, и должен быть найден крайний луч, с помощью которого строится нарушенное ограничение.
На любой итерации t известна нижняя оценка х оптимального значения целевой функции. Значение х можно выбрать точно так же. Кроме того, имеется основной список задач, в котором каждой задаче соответствует определенное частичное решение.
Теперь можно найти то решение, которое соответствует оптимальному значению целевой функции.
В начале любой итерации t известна верхняя оценка х оптимального значения целевой функции. Значение х определяется общепринятым способом. Кроме того, задан основной список задач, содержащий некоторое подмножество Xij 1, определяющее частичный цикл, и подмножество значений с - -, принятых в результате пересмотра равными оо. Для вычисления нижней оценки оптимального значения целевой функции, соответствующей циклу, который является дополнением частичного цикла, можно применить тот же метод, что и в алгоритме задания маршрутов. С другой стороны, можно определять оптимальное решение задачи о назначениях, включив в эту задачу коэффициенты с -, принадлежащие строкам и столбцам, не связанным с подмножеством xti 1, которые входят в частичный цикл.
В таких случаях существует бесконечно много планов, отвечающих оптимальному значению целевой функции. В многомерном случае говорят, что гиперплоскость постоянной прибыли параллельна гиперплоскости - границе одного из ресурсов.
Теорема 4.1. Последовательность Q (Xh) сходится к оптимальному значению целевой функции детерминированной задачи, эквивалентной двухэтапной стохастической задаче линейного программирования. Последовательность лг / J содержит сходящуюся подпоследовательность. Каждая сходящаяся подпоследовательность из Xh сходится к оптимальному предварительному плану х двухэташюй стохастической задачи.
Следует отметить, что очень часто в связи с ограничениями оптимальное значение целевой функции достигается не там, где ее поверхность имеет нулевой градиент. Нередко лучшее решение соответствует одной из границ области проектирования.
В начале любой итерации t известна верхняя оценка х а оптимального значения целевой функции.
В заключительной части настоящего раздела обсуждается вопрос о приближенных методах оценки оптимальных значений целевой функции при различных предположениях относительно структуры стохастической модели. В следующем разделе рассматривается другая формулировка двухшаговой стохастической задачи линейного программирования, допускающая переход к стандартной модели линейного программирования с сохранением размерности.
Действительно, согласно (VI5), значение двойственной функции всегда меньше оптимального значения целевой функции. Отсюда расчет двойственной функции при любых значениях множителей Лагранжа дает нижнюю оценку данного варианта ветвления.
В условиях рыночной системы управления производственной и сбытовой деятельностью предприятий и фирм в основе принятия хозяйственных решений лежит рыночная информация, а обоснованность решений проверяется рынком в ходе реализации товаров и услуг. При таком подходе начальным пунктом всего цикла предпринимательской деятельности становится изучение потребительского спроса. Рассмотрим некоторые вопросы моделирования спроса и потребления.
Рассмотрим потребителя, который в результате своего существования потребляет некоторые блага. Уровень удовлетворения потребностей потребителя обозначим через U .Предположим, что имеется n видов благ Б 1 , Б 2 ,…, Б n . В качестве благ могут выступать:
· продовольственные товары;
· товары первой необходимости;
· товары второй необходимости;
· предметы роскоши;
· платные услуги и т. д.
Пусть количество потребления каждого блага равно х 1 , х 2 ,…, х n . Целевой функцией потребления называется зависимость между степенью (уровнем) удовлетворения потребностей U и количеством потребляемых благ: х 1 , х 2 , …, х n . Эта функция имеет вид .
 В пространстве потребительских благ каждому уравнению соответствует определенная поверхность равноценных, или безразличных, наборов благ, которая называется поверхностью безразличия
. Гиперповерхность такой кривой, называемой многомерной поверхностью безразличия, можно представить в виде , где С
- константа. Для наглядности рассмотрим пространство двух благ, например, в виде двух агрегированных групп товаров: продукты питания Б 1 и непродовольственные товары, включая платные услуги Б 2
. Тогда уровни целевой функции потребления можно изобразить на плоскости в виде кривых безразличия, соответствующих различным значениям константы С
.Для этого выражают количество потребления одного блага х
1 через другое х
2 . Рассмотрим пример.
В пространстве потребительских благ каждому уравнению соответствует определенная поверхность равноценных, или безразличных, наборов благ, которая называется поверхностью безразличия
. Гиперповерхность такой кривой, называемой многомерной поверхностью безразличия, можно представить в виде , где С
- константа. Для наглядности рассмотрим пространство двух благ, например, в виде двух агрегированных групп товаров: продукты питания Б 1 и непродовольственные товары, включая платные услуги Б 2
. Тогда уровни целевой функции потребления можно изобразить на плоскости в виде кривых безразличия, соответствующих различным значениям константы С
.Для этого выражают количество потребления одного блага х
1 через другое х
2 . Рассмотрим пример.
Пример 6.3 . Целевая функция потребления имеет вид . Найти кривые безразличия.
Решение
.
Кривые безразличия имеют вид ![]() или , или (при этом следует отметить, что должно выполняться ).
или , или (при этом следует отметить, что должно выполняться ).
Каждый потребитель стремится максимизировать уровень удовлетворения потребностей, то есть . Однако максимизации степени удовлетворения потребностей будут мешать возможности потребителя. Обозначим цену на единицу каждого блага через р 1 , р 2 ,…, р n , а доход потребителя через D .Тогда должно выполняться бюджетное ограничение , имеющее смысл закона, согласно которому затраты потребителя не должны превышать сумму дохода:
В результате для нахождения оптимального набора благ необходимо решать задачу оптимального программирования:
 (6.3)
(6.3)
Рассмотрим двухфакторную функцию потребления , где х 1 - объем потребления продуктов питания и х 2 - потребление непродовольственных товаров и платных услуг. Кроме того, предположим, что весь доход потребитель направляет на удовлетворение своих потребностей. В этом случае бюджетное ограничение будет содержать только два слагаемых, и неравенство превратится в равенство. Задача оптимального программирования при этом примет вид:
 (6.4)
(6.4)
Геометрически оптимальное решение имеет смысл точки касания кривой безразличия линии, соответствующей бюджетному ограничению.

|
Пример 6.4
. Целевая функция потребления имеет вид ![]() . Цена на благо Б 1
равна 20, цена на благо Б 2
равна 50. Доход потребителя составляет 1800 единиц. Найти кривые безразличия, оптимальный набор благ потребителя, функцию спроса на первое благо по цене, функцию спроса на первое благо по доходу.
. Цена на благо Б 1
равна 20, цена на благо Б 2
равна 50. Доход потребителя составляет 1800 единиц. Найти кривые безразличия, оптимальный набор благ потребителя, функцию спроса на первое благо по цене, функцию спроса на первое благо по доходу.
Решение. Кривые безразличия имеют вид:
Получаем множество гипербол, расположенных в первой координатной четверти на разном расстоянии от начала координат в зависимости от значения константы С .
Находим оптимальный набор благ. Задача оптимального программирования имеет вид:

Для ее решения выражаем из бюджетного ограничения одну переменную через другую: ![]() . Подставляем в целевую функцию
. Подставляем в целевую функцию
Находим производную и приравниваем ее к нулю

Получаем .
Таким образом, оптимальный набор благ составляют 30,5 и 23,8 единиц. Находим теперь функцию спроса на первое благо по цене на него. Для этого в бюджетном ограничении вместо фиксированного значения вводим цену первого блага , получая уравнение: . Выражаем ![]()

или ![]() , откуда находим функцию спроса на первое благо по цене: .
, откуда находим функцию спроса на первое благо по цене: .
Находим теперь функцию спроса на первое благо по доходу. Для этого выражаем из бюджетного ограничения ![]() одну переменную через другую:
одну переменную через другую: ![]() . Подставляем в целевую функцию:
. Подставляем в целевую функцию:
Находим производную и приравниваем ее к нулю:

Отсюда находим функцию спроса на первое благо по доходу
7. Модель
межотраслевого баланса
Балансовые модели предназначены для анализа и планирования производства и распределения продукции на различных уровнях - от отдельного предприятия до народного хозяйства в целом. Если вспомнить историю народного хозяйства как Советского Союза и России, так и других развитых стран, то можно наблюдать, что в экономике многих государств в разное время случались экономические кризисы разных крайностей от кризисов перепроизводства (США, середина ХХ века), до дефицита (Россия, конец ХХ века). Все эти экономические кризисы связаны с нарушением баланса между производством и потреблением. Из этих фактов видно, что баланс между произведенной продукцией и потреблением является важным критерием как для макроэкономики, так и для микроэкономики.
Экономико-математические модели баланса пытались выстроить многие экономисты и математики с самого начала возникновения проблемы, однако, наиболее полную балансовую модель удалось построить в 1936 г. американским экономистом В. Леонтьевым (который после революции эмигрировал в США и за свою модель получил Нобелевскую премию в области экономики). Эта модель позволяла рассчитать баланс между несколькими взаимодействующими отраслями, хотя ее можно легко обобщить и для организаций микроэкономики, например, для вычисления баланса между несколькими взаимодействующими предприятиями или между подразделениями одного предприятия (например, цехами одного завода).
Цель балансового анализа - ответить на вопрос, возникающий в макроэкономике и связанный с эффективностью ведения многоотраслевого хозяйства: каким должен быть объем производства каждой из п отраслей, чтобы удовлетворить все потребности в продукции этой отрасли? При этом каждая отрасль выступает, с одной стороны, как производитель некоторой продукции; а с другой - как потребитель продукции и своей, и произведенной другими отраслями.
Предположим, что рассматривается п отраслей промышленности, каждая из которых производит свою продукцию. Пусть общий объем произведенной продукции i -й отрасли равен . Полная стоимость продукции, произведенной i -й отраслью, будем называть валовым продуктом этой отрасли. Теперь рассмотрим, на что тратится продукция, производимая отраслью. Часть продукции идет на внутрипроизводственное потребление данной отраслью и потребление другими отраслями, связанными с этой отраслью. Количество продукции i -й отрасли, предназначенной для конечного потребления (вне сферы материального производства) личного и общественного j -й отраслью, обозначим . Оставшаяся часть предназначена для реализации во внешнюю сферу. Эта часть называется конечным продуктом. Пусть i -я отрасль производит конечного продукта.
Рассмотрим процесс производства за некоторый период времени (например, год). Так как валовой объем продукции любой i -й отрасли равен суммарному объему продукции, потребляемой n отраслями, и конечного продукта, то уравнение баланса между производством и потреблением будет иметь вид
, (i = 1, 2, …, n ). (7.1)
Уравнения (7.1) называются соотношениями баланса.
![]() . (7.2)
. (7.2)
Все ранее рассмотренные показатели можно записать в основную балансовую таблицу:
| Отрасль | Потребление отраслей, | Конечный продукт, | Валовойпродукт, | |||
| … | n | |||||
| … | ||||||
| … | ||||||
| … | … | … | … | |||
| n | … | |||||
| Чистый продукт | … |
В результате основная балансовая таблица содержит четыре матрицы: матрицу межотраслевых производственных связей
 ; матрицу валовой продукции ; матрицу конечной продукции и матрицу чистой продукции
; матрицу валовой продукции ; матрицу конечной продукции и матрицу чистой продукции ![]() .
.
Одной из задач балансового анализа является определение валового продукта , если известно распределение конечного . Для этого введем коэффициенты прямых затрат
Они получаются в результате деления всех элементов каждого столбца матрицы на соответствующий элемент матрицы межотраслевых производственных связей Х .Коэффициенты прямых затрат имеют смысл количества потребления продукции j -й отрасли, необходимой для производства единицы продукции i -й отраслью. Из выражения (7.3) можно получить: . Подставив последнее выражение в соотношение баланса (7.1), получим
![]() . (7.4)
. (7.4)
Если обозначить матрицу коэффициентов прямых затрат как  , то соотношение баланса (7.4) в матричном виде можно записать в виде
, то соотношение баланса (7.4) в матричном виде можно записать в виде
Из последнего выражения можно найти значение конечного продукта при известном значении валового
где  - единичная матрица того же размера, что и А
.
- единичная матрица того же размера, что и А
.
Пример 7.1
. Баланс четырех отраслей за предыдущий период имеет матрицу межотраслевых производственных связей вида  и матрицу валовой продукции вида . Необходимо определить конечный продукт Y
и чистый продукт C
каждой отрасли.
и матрицу валовой продукции вида . Необходимо определить конечный продукт Y
и чистый продукт C
каждой отрасли.
Конечный продукт Y получается в результате вычитания из каждого элемента матрицы валовой продукции суммы элементов соответствующих строк матрицы . Например, первое значение равно 100 – (10 + 20 + 15 + 10) = 45. Чистый продукт С получается в результате вычитания из каждого элемента матрицы валовой продукции Х суммы элементов соответствующих столбцов матрицы . Например, первое значение равно 100 – (10 + 5 + 25 + 20) = 40. В результате получим основную балансовую таблицу:
| Отрасль | Потребление отраслей, | Конечный продукт, | Валовойпродукт, | |||
| Чистый продукт, | S = 210 | S = 400 |
Поставим теперь другую задачу: рассчитаем конечный продукт каждой отрасли на будущий период, если валовой продукт окажется равным  . Для решения этой задачи найдем коэффициенты прямых затрат:i
-й отрасли.
. Для решения этой задачи найдем коэффициенты прямых затрат:i
-й отрасли.
Пример 7.2 . В некотором регионе имеются две основные отрасли народного хозяйства: машиностроение (м/с) и сельское хозяйство (с/х). Баланс этих отраслей за отчетный период определяется матрицами , . Вычислим остальные показатели и заполним основную балансовую таблицу
Предположим, что на будущий период планируется конечная продукция в объемах . Нужно определить, какой валовой продукт при этом нужно планировать. Найдем коэффициенты прямых затрат:
Можно выделить следующие причины, по которым экономические системы являются стохастическими:
1) система сложная, многокритериальная, описывается многоуровневой иерархической структурой;
2) система подвержена влиянию большого числа неуправляемых внешних факторов (погодные условия, внешняя политика, социальные факторы и т. д.);
3) преднамеренное искажение информации, сокрытие информации и целенаправленная экономическая диверсия.
Исходя из этого для моделирования многих экономических систем используют математические методы, основанные на применении законов теории вероятностей, которые получили название стохастических методов .
При применении стохастических методов оптимизация целевой функции ведется по среднему значению, то есть при заданных параметрах необходимо найти такое решение, когда значение целевой функции в среднем будет максимальным.
Стохастические системы в экономике описываются марковским аппаратом, в основе которого лежат марковские случайные процессы . Они применяются в случаях, когда нельзя заформализовать модель (описать аналитическим выражением) и в случае, когда система представляет собой многопараметрическую вероятностную экономическую систему.
Целевая функция - вещественная или целочисленная функция нескольких переменных, подлежащая оптимизации (минимизации или максимизации) в целях решения некоторой оптимизационной задачи. Термин используется в математическом программировании, исследовании операций, линейном программировании, теории статистических решений и других областях математики в первую очередь прикладного характера, хотя целью оптимизации может быть и решение собственно математической задачи. Помимо целевой функции в задаче оптимизации для переменных могут быть заданы ограничения в виде системы равенств или неравенств. В общем случае аргументы целевой функции могут задаваться на произвольных множествах.
Примеры
Гладкие функции и системы уравнений
Задача решения любой системы уравнений
{ F 1 (x 1 , x 2 , … , x M) = 0 F 2 (x 1 , x 2 , … , x M) = 0 … F N (x 1 , x 2 , … , x M) = 0 {\displaystyle \left\{{\begin{matrix}F_{1}(x_{1},x_{2},\ldots ,x_{M})=0\\F_{2}(x_{1},x_{2},\ldots ,x_{M})=0\\\ldots \\F_{N}(x_{1},x_{2},\ldots ,x_{M})=0\end{matrix}}\right.}
может быть сформулирована как задача минимизации целевой функции
S = ∑ j = 1 N F j 2 (x 1 , x 2 , … , x M) (1) {\displaystyle S=\sum _{j=1}^{N}F_{j}^{2}(x_{1},x_{2},\ldots ,x_{M})\qquad (1)}
Если функции гладкие, то задачу минимизации можно решать градиентными методами.
Для всякой гладкой целевой функции можно приравнять к 0 {\displaystyle 0} частные производные по всем переменным. Оптимум целевой функции будет одним из решений такой системы уравнений. В случае функции (1) {\displaystyle (1)} это будет система уравнений метода наименьших квадратов (МНК). Всякое решение исходной системы является решением системы МНК. Если исходная система несовместна, то всегда имеющая решение система МНК позволяет получить приближённое решение исходной системы. Число уравнений системы МНК совпадает с числом неизвестных, что иногда облегчает и решение совместных исходных систем.
Линейное программирование
Другим известным примером целевой функции является линейная функция, которая возникает в задачах линейного программирования. В отличие от квадратичной целевой функции оптимизация линейной функции возможна только при наличии ограничений в виде системы линейных равенств или неравенств.
Комбинаторная оптимизация
Типичным примером комбинаторной целевой функции является целевая функция задачи коммивояжёра. Эта функция равна длине гамильтонова цикла на графе. Она задана на множестве перестановок n − 1 {\displaystyle n-1} вершины графа и определяется матрицей длин рёбер графа. Точное решение подобных задач часто сводится к перебору вариантов.
Глава 1. Постановка основной задачи линейного программирования
Линейное программирование
Линейное программирование – это направление математического программирования, изучающее методы решения экстремальных задач, которые характеризуются линейной зависимостью между переменными и линейным критерием. Такие задачи находят обширные приложения в различных сферах человеческой деятельности. Систематическое изучение задач такого типа началось в 1939 – 1940 гг. в работах Л.В. Канторовича.
К математическим задачам линейного программирования относят исследования конкретных производственно-хозяйственных ситуаций, которые в том или ином виде интерпретируются как задачи об оптимальном использовании ограниченных ресурсов.
Круг задач, решаемых при помощи методов линейного программирования достаточно широк.Это, например:
задача об оптимальном использовании ресурсов при производственном планировании;
задача о смесях (планирование состава продукции);
задача о нахождении оптимальной комбинации различных видов продукции для хранения на складах (управление товарно-материальными запасами или);
транспортные задачи (анализ размещения предприятия, перемещение грузов).
Линейное программирование – наиболее разработанный и широко применяемый раздел математического программирования (кроме того, сюда относят: целочисленное, динамическое, нелинейное, параметрическое программирование). Это объясняется следующим:
математические модели большого числа экономических задач линейны относительно искомых переменных;
данный тип задач в настоящее время наиболее изучен. Для него разработаны специальные методы, с помощью которых эти задачи решаются, и соответствующие программы для ЭВМ;
многие задачи линейного программирования, будучи решенными, нашли широкое применение;
некоторые задачи, которые в первоначальной формулировке не являются линейными, после ряда дополнительных ограничений и допущений могут стать линейными или могут быть приведены к такой форме, что их можно решать методами линейного программирования.
Экономико-математическая модель любой задачи линейного программирования включает: целевую функцию, оптимальное значение которой (максимум или минимум) требуется отыскать; ограничения в виде системы линейных уравнений или неравенств; требование неотрицательности переменных.
В общем виде модель записывается следующим образом:
целевая функция
(1.1) при ограничениях
 (1.2) требования неотрицательности
(1.2) требования неотрицательности
 (1.3) где x
j
– переменные (неизвестные);
(1.3) где x
j
– переменные (неизвестные);
 - коэффициенты задачи линейного программирования.
- коэффициенты задачи линейного программирования.
Задача состоит в нахождении оптимального значения функции (1.1) при соблюдении ограничений (1.2) и (1.3).
Систему ограничений (1.2) называют функциональными ограничениями задачи, а ограничения (1.3) - прямыми.
Вектор, удовлетворяющий ограничениям (1.2) и (1.3), называется допустимым решением (планом) задачи линейного программирования. План, при котором функция (1.1) достигает своего максимального (минимального) значения, называется оптимальным.
1.2. Симплекс метод решения задач линейного программирования
Симплекс-метод был разработан и впервые применен для решения задач в 1947 г. американским математиком Дж. Данцигом.
Двумерные задачи линейного программирования решаются графически. Для случая N=3 можно рассмотреть трехмерное пространство и целевая функция будет достигать своё оптимальное значение в одной из вершин многогранника.
Допустимым решением (допустимым планом) задачи ЛП, данной в стандартной форме, называется упорядоченное множество чисел (х1, х2, …, хn), удовлетворяющих ограничениям; это точка в n-мерном пространстве.
Множество допустимых решений образует область допустимых решений (ОДР) задачи ЛП. ОДР представляет собой выпуклый многогранник (многоугольник).
В общем виде, когда в задаче участвуют N-неизвестных, можно сказать, что область допустимых решений, задаваемая системой ограничивающих условий, представляется выпуклым многогранником в n-мерном пространстве и оптимальное значение целевой функции достигается в одной или нескольких вершинах.
Базисным называется решение, при котором все свободные переменные равны нулю.
Опорное решение - это базисное неотрицательное решение. Опорное решение может быть невырожденным и вырожденным. Опорное решение называется невырожденным, если число его ненулевых координат равно рангу системы, в противном случае оно является вырожденным.
Допустимое решение, при котором целевая функция достигает своего экстремального значения, называется оптимальным и обозначается  .
.
Решить данные задачи графически, когда количество переменных более 3 весьма затруднительно. Существует универсальный способ решения задач линейного программирования, называемый симплекс-методом.
Симплекс-метод - это универсальный метод решения задач ЛП, представляющий собой итерационный процесс, который начинается с одного решения и в поисках лучшего варианта движется по угловым точкам области допустимых решений до тех пор, пока не достигнет оптимального значения.
С его помощью можно решить любую задачу линейного программирования.
В основу симплексного метода положена идея последовательного улучшения получаемого решения.
Геометрический смысл симплексного метода состоит в последовательном переходе от одной вершины многогранника ограничений к соседней, в которой целевая функция принимает лучшее (или, по крайней мере, не худшее) значение до тех пор, пока не будет найдено оптимальное решение - вершина, где достигается оптимальное значение функции цели (если задача имеет конечный оптимум).
Таким образом, имея систему ограничений, приведенную к канонической форме (все функциональные ограничения имеют вид равенств), находят любое базисное решение этой системы, заботясь только о том, чтобы найти его как можно проще. Если первое же найденное базисное решение оказалось допустимым, то проверяют его на оптимальность. Если оно не оптимально, то осуществляется переход к другому, обязательно допустимому базисному решению. Симплексный метод гарантирует, что при этом новом решении целевая функция, если и не достигнет оптимума, то приблизится к нему (или, по крайней мере, не удалится от него). С новым допустимым базисным решением поступают так же, пока не отыщется решение, которое является оптимальным.
Процесс применения симплексного метода предполагает реализацию трех его основных элементов:
способ определения какого-либо первоначального допустимого базисного решения задачи;
правило перехода к лучшему (точнее, не худшему) решению;
критерий проверки оптимальности найденного решения.
Симплексный метод включает в себя ряд этапов и может быть сформулирован в виде четкого алгоритма (четкого предписания о выполнении последовательных операций). Это позволяет успешно программировать и реализовывать его на ЭВМ. Задачи с небольшим числом переменных и ограничений могут быть решены симплексным методом вручную.
6.1.Введение
Оптимизация. Часть 1
Методы оптимизации позволяют выбрать наилучший вариант конструкции из всех возможных вариантов. В последние годы этим методам уделялось большое внимание, и в результате был разработан целый ряд высокоэффективных алгоритмов, позволяющих найти оптимальный вариант конструкции при помощи ЭЦВМ. В данной главе излагаются основы теории оптимизации, рассмат-риваются принципы, лежащие в основе построения алгоритмов оптимальных решений, описываются наиболее известные алгоритмы, анализируются их достоинства и недостатки.
6.2.Основы теории оптимизации
Термином «оптимизация» в литературе обозначают процесс или последовательность операций, позволяющих получить уточненное решение. Хотя конечной целью оптимизации является отыскание наилучшего, или «оптимального», решения, обычно приходится довольствоваться улучшением известных решений, а не доведением их до совершенства. Поэтому под оптимизацией понимают скорее стремление к совершенству, которое, возможно, и не будет достигнуто.
Рассматривая некоторую произвольную систему, описываемую m уравнениями с n неизвестными, можно выделить три основных типа задач. Если m=n , задачу называют алгебраической. Такая задача обычно имеет одно решение. Если m>n, то задача переопределена и, как правило, не имеет решения. Наконец, при m
Прежде чем приступить к обсуждению вопросов оптимизации, введем ряд определений.
Проектные параметры
Этим термином обозначают независимые переменные параметры, которые полностью и однозначно определяют решаемую задачу проектирования. Проектные параметры - неизвестные величины, значения которых вычисляются в процессе оптимизации. В качестве проектных параметров могут служить любые основные или произ-водные величины, служащие для количественного описания системы. Так, это могут быть неизвестные значения длины, массы, време-ни, температуры. Число проектных параметров характеризует сте-пень сложности данной задачи проектирования. Обычно число проектных параметров обозначают через n, а сами проектные пара-метры через х с соответствующими индексами. Таким образом n проектных параметров данной задачи будем обозначать через
X1, x2, x3,...,xn.
Целевая функция
Это - выражение, значение которого инженер стремится сделать максимальным или минимальным. Целевая функция позволяет количественно сравнить два альтернативных решения. С мате-матической точки зрения целевая функция описывает некоторую (n+1) - мерную поверхность. Ее значение определяется проектными параметрами
M=M(x 1 , x 2 ,...,x n).
Примерами целевой функции, часто встречающимися в инженерной практике, являются стоимость, вес, прочность, габариты, КПД. Если имеется только один проектный параметр, то целевую функцию можно представить кривой на плоскости (рис.6.1). Если проектных параметров два, то целевая функция будет изображаться поверх-ностью в пространстве трех измерений (рис.6.2). При трех и более проектных параметрах поверхности, задаваемые целевой функцией, называются гиперповерхностями и не поддаются изобра-
жению обычными средствами. Топологические свойства поверхности целевой функции играют большую роль в процессе оптимизации, так как от них зависит выбор наиболее эффективного алгоритма.
Целевая функция в ряде случаев может принимать самые неожиданные формы. Например, ее не всегда удается выразить в
Рис.1.Одномерная целевая функция.
Рис.6.2.Двумерная целевая функция.
замкнутой математической форме, в других случаях она может
представлять собой кусочно-гладкую функцию. Для задания целевой функции иногда может потребоваться таблица технических данных (например, таблица состояния водяного пара) или может понадобиться провести эксперимент. В ряде случаев проектные параметры принимают только целые значения. Примером может служить число зубьев в зубчатой передаче или число болтов во фланце. Иногда проектные параметры имеют только два значения - да или нет. Качественные параметры, такие как удовлетворение, которое испытывает приобретший изделие покупатель, надежность, эстетичность, трудно учитывать в процессе оптимизации, так как их практически невозможно охарактеризовать количественно. Однако в каком бы виде ни была представлена целевая функция, она должна быть однозначной функцией проектных параметров.
В ряде задач оптимизации требуется введение более одной целевой функции. Иногда одна из них может оказаться несов-местимой с другой. Примером служит проектирование самолетов, когда одновременно требуется обеспечить максимальную прочность, минимальный вес и минимальную стоимость. В таких случаях конструктор должен ввести систему приоритетов и поставить в соответствие каждой целевой функции некоторый безразмерный мно-житель. В результате появляется «функция компромисса», позво-ляющая в процессе оптимизации пользоваться одной составной целевой функцией.
Поиск минимума и максимума
Одни алгоритмы оптимизации приспособлены для поиска максимума, другие - для поиска минимума. Однако независимо от типа решаемой задачи на экстремум можно пользоваться одним т тем же алгоритмом, так как задачу минимизации можно легко превратить в задачу на поиск максимума, поменяв знак целевой функции на обратный. Этот прием иллюстрируется рис.6.3.
Пространство проектирования
Так называется область, определяемая всеми n проектными параметрами. Пространство проектирования не столь велико, как может показаться, поскольку оно обычно ограничено рядом
условий, связанных с физической сущностью задачи. Ограничения могут быть столь сильными, что задача не будет иметь ни одного
Рис.6.3.Изменением знака целевой функции на противоположный
задача на максимум превращается в задачу на минимум.
удовлетворительного решения. Ограничения делятся на две группы: ограничения - равенства и ограничения - неравенства.
Ограничения - равенства
Ограничения - равенства - это зависимость между проектными параметрами, которые должны учитываться при отыскании решения. Они отражают законы природы, экономики, права, господствующие вкусы и наличие необходимых материалов. Число ограничений - равенств может быть любым. Они имеют вид
C 1 (x 1 , x 2 ,...,x n)=0,
C 2 (x 1 , x 2 ,...,x n)=0,
..................
C j (x 1 , x 2 ,...,x n)=0.
Если какое-либо из этих соотношений можно разрешить отно-сительно одного из проектных параметров, то это позволяет исключить данный параметр из процесса оптимизации. Тем самым уменьшается число измерений пространства проектирования и упрощается решение задачи.
Ограничения - неравенства
Это особый вид ограничений, выраженных неравенствами. В общем случае их может быть сколько угодно, причем все они имееют вид
z 1 r 1 (x 1 , x 2 ,...,x n) Z 1
z 2 r 2 (x 1 , x 2 ,...,x n) Z 2
.......................
z k r k (x 1 , x 2 ,...,x n) Z k
Следует отметить, что очень часто в связи с ограничениями оптимальное значение целевой функции достигается не тем, где ее поверхность имеет нулевой градиент. Нередко лучшее решение соответствует одной из границ области проектирования.
Локальный оптимум
Так называется точка пространства проектирования, в которой целевая функция имеет наибольшее значение по сравнению с ее значениями во всех других точках ее ближайшей окрестности.
Рис.6.4.Произвольная целевая функция может иметь несколько
локальных оптимумов.
На рис. 6.4 показана одномерная целевая функция, имеющая два локальных оптимума. Часто пространство проектирования содержит много локальных оптимумов и следует соблюдать осторожность, чтобы не принять первый из них за оптимальное решение задачи.
Глобальный оптимум
Глобальный оптимум - это оптимальное решение для всего пространства проектирования. Оно лучше всех других решений, соответствующих локальным оптимумам, и именно его ищет конструктор. Возможен случай нескольких равных глобальных оптимумов, расположенных в разных частях пространства проектирования. Как ставится задача оптимизации, лучше всего показать на примере.
Пример 6.1

Пусть требуется спроектировать прямоугольный контейнер объемом 1м , предназначенный для перевозки неупакованного волокна. Желательно, чтобы на изготовление таких контейнеров затрачивалось как можно меньше материала (при условии посто-янства толщины стенок это означает, что площадь поверхности должна быть минимальной), так как при этом он будет дешевле. Чтобы контейнер удобно было брать автопогрузчиком, его ширина должна быть не менее 1,5м.
Сформулируем эту задачу в виде, удобном для применения алгоритма оптимизации.
Проектные параметры: x 1 , x 2 , x 3 .
Целевая функция (которую требуется минимизировать) - площадь боковой поверхности контейнера:
A=2(x 1 x 2 +x 2 x 3 +x 1 x 3), м2.
Ограничение - равенство:
Объем = x 1 x 2 x 3 =1м3.
Ограничение - неравенство:
Задачи линейного программирования
Линейное программирование (ЛП) является одним из разделов математического программирования – дисциплины, изучающей экстремальные (оптимизационные) задачи и разработкой методов их решения.
Оптимизационная задача – это математическая задача, заключающаяся в нахождении оптимального (т.е. максимального или минимального) значения целевой функции, причем значения переменных должны принадлежать некоторой области допустимых значений (ОДЗ).
В общем виде постановка экстремальной задачи математического программирования состоит в определении наибольшего или наименьшего значения функции , называемой целевой функцией , при условиях (ограничениях) , где и – заданные функции, а – заданные постоянные величины. При этом ограничения в виде равенств и неравенств определяют множество (область) допустимых решений (ОДР), а – называют проектными параметрами .
В зависимости от вида функций и задачи математического программирования делятся на ряд классов (линейной, нелинейное, выпуклое, целочисленное, стохастическое, динамическое программирование и др.).
В общем виде задача ЛП имеет следующий вид:
![]() , (5.1)
, (5.1)
![]() , , (5.2)
, , (5.2)
, ![]() , (5.3)
, (5.3)
где , , – заданные постоянные величины.
Функцию (5.1) называют целевой функцией; системы (5.2), (5.3) – системой ограничений; условие (5.4) – условием неотрицательности проектных параметров.
Совокупность проектных параметров , удовлетворяющих ограничениям (5.2), (5.3) и (5.4), называют допустимым решением или планом .
Оптимальным решением или оптимальным планом задачи ЛП называется допустимое решение , при котором целевая функция (5.1) принимает оптимальное (максимальное или минимальное) значение.
Стандартной задачей ЛП называют задачу нахождения максимального (минимального) значения целевой функции (5.1) при условии (5.2) и (5.4), где , , т.е. т.е. ограничения только в виде неравенств (5.2) и все проектные параметры удовлетворяют условию неотрицательности, а условия в виде равенств отсутствуют:
![]() ,
,
![]() , , (5.5)
, , (5.5)
![]() .
.
Канонической (основной) задачей ЛП называют задачу нахождения максимального (минимального) значения целевой функции (5.1) при условии (5.3) и (5.4), где , , т.е. т.е. ограничения только в виде равенств (5.3) и все проектные параметры удовлетворяют условию неотрицательности, а условия в виде неравенств отсутствуют:
![]() ,
,
![]() .
.
Каноническую задачу ЛП можно также записать в матричной и векторной форме.
Матричная форма канонической задачи ЛП имеет следующий вид:

Векторная форма канонической задачи ЛП.